發布日期:2022-10-09 點擊率:71
Adept MobileRobots項目經理Seth Allen認為,地面機器人系統必須常常處理"枯燥、骯臟、危險"的工作。換言之,機器人系統通常用于人工介入成本過高、危險過大或者效率過低的任務。在許多情況下,機器人平臺的自主工作能力是一項極為重要的特性,即通過導航系統來監視并控制機器人從一個位置移到下一位置的運動。管理位置和運動時的精度是實現高效自主工作的關鍵因素,MEMS(微機電系統)陀螺儀可提供反饋檢測機制, 對優化導航系統性能非常有用。
圖1中所示的Seekur機器人系統就是一個采用先進MEMS器件來改善導航性能的自主系統。

圖1.Adept MobileRobots公司的Seekur系統。
機器人導航概述
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。(例如,對于醫院里的標本遞送機器人,遞送時間非常關鍵。)行程計劃被饋入控制器,后者生成傳動和方向配置文件以便進行導航控制。這些配置文件可根據行程計劃執行動作和進程。該運動通常由若干檢測系統進行監控,各檢測系統均產生反饋信號;反饋控制器將信號組合并轉換成更新后的行程計劃和條件。圖2是一般導航系統的基本框圖。
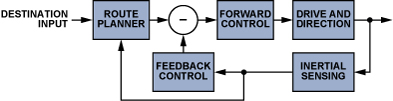
圖2.一般導航系統框圖。
開發導航系統的關鍵步驟始于充分了解每種功能,尤其需要重視其工作目標和限制。各項功能通常都有一些明確界定且易于執行的因素,但也會提出一些需要加以處理的具有挑戰性的限制。某些情況下,這可能是一個反復試探的過程,即識別和處理限制的同時又會帶來新的優化機遇。通過一個實例可以清楚說明這一過程。
Adept MobileRobots Seekur機器人
Adept MobileRobots Seekur2是一款采用慣性導航系統 (INS)的自主機器人,參見圖3。該車輛具有4輪傳動系統,每個車輪均有獨立轉向和速度控制能力,可在任何水平方向上靈活地移動平臺。此能力對于倉庫交貨系統、醫院標本/補給品遞送系統和軍隊增援系統等新興應用中的機器人車輛非常有用。
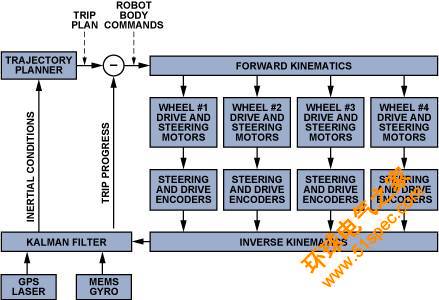
圖3.Adept MobileRobots Seekur導航系統。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


