發布日期:2022-08-21 點擊率:79
汽車發動機缸體的幾何位置精度直接影響發動機的工作性能。為了實現對缸體加工誤差的高精度、高效率測量, 湖北汽車工業學院研制了一臺EQ491 發動機缸體垂直度測量儀,用于檢測缸孔軸線相對于曲軸孔軸線的垂直度誤差(要求< 0. 05mm) 和位置度誤差(要求< 0. 15mm) 。
1 、測量原理
圖1 所示為發動機缸體垂直度測量儀的測量示意圖。測量儀主要由基座、立柱、缸體定位部件、水平方向精密滾動導軌及導軌工作臺、垂直方向精密滾動導軌、電子塞規A、B 等部件組成。測量時,將被測缸體放入定位部件中,移動電子塞規A 和B ,分別插入缸孔和曲軸孔中進行測量。電子塞規A 和B上分別裝有8 個(共16 個) 精密電感傳感器,它們均勻布置在兩個不同的測量截面上(如圖2 所示) ,用于測量缸孔和曲軸孔四個不同截面的半徑值Ri 。
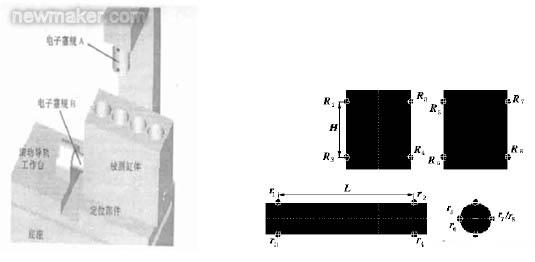
圖1 發動機缸體垂直度測量儀測量示意圖 圖2 電感傳感器測量位置分布示意圖
根據空間直線度誤差的定義, 最小二乘評定法的空間直線度誤差為
f = 2 ×max{ Ri} ( i = 1 ,2 , ..., n)
在實際應用中,為簡化計算,提高運算速度, 可用各被測點Oi 至最小二乘直線L 的偏差εi 代替各被測點至最小二乘直線L 的距離Ri ,即
f = 2 ×max{εi } ( i = 1 ,2 , ..., n)
這樣處理帶來的誤差很小,對最終計算結果的影響可忽略不計。
2 、測量精度分析
根據上述測量原理,可知儀器的測量誤差主要來源于傳感器誤差、缸體定位誤差、水平方向和垂直方向滾動導軌的直線度誤差、缸體標準件誤差等。計算機A/ D 轉換及數據處理誤差很小,可忽略不計。下面對測量垂直度誤差T1 時的測量誤差作一分析。
(1) 傳感器誤差引起的測量誤差
對垂直度誤差T1 的計算公式求導后,函數T1的測量極限誤差為
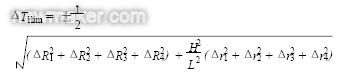
設單個傳感器的最大極限誤差ΔRilim ≤±1μm ,H/ L = 1/ 4 ,則ΔT1lim ≤±1. 12μm。
(2) 缸體定位誤差引起的測量誤差
被測缸體在測量儀上的定位采用一面兩銷定位方式。當存在定位誤差時,將引起測量點不準,缸孔測量偏心。由于傳感器的測量值為孔的弦長,因此缸體定位誤差引起的測量誤差為
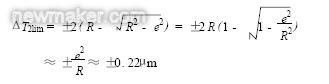
式中,缸孔半徑R = 45mm ,偏心量e = 0. 1mm。
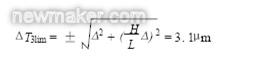
(3) 水平方向和垂直方向滾動導軌直線度誤差
Δ引起的測量誤差
測量儀所用滾動導軌的直線度精度為三級(即15μm/ 2000mm) ,則Δ= 3μm/ 400mm。Δ 引起的測量誤差為
(4) 缸體標準件誤差引起的測量誤差
缸體標準件誤差是影響整機測量精度的一項關鍵指標。通過精心調整和檢測修正,最終將標準件誤差引起的測量誤差控制在ΔT4lim ≤±3μm。
(5) 誤差合成
對上述各項誤差進行誤差合成,可得缸體垂直度測量儀的測量誤差為

3、結論
(1) 研制了采用準直激光束作為測量基準軸線、線陣CCD 光電器件作為傳感器、由單片機進行數據采集、處理與顯示的直線度自動檢查儀,可對大型機床精密導軌副的直線度誤差及運動精度進行高精度測量,整機示值誤差可達0.02mm。
(2) 系統光路設計采用反射靶上的角隅棱鏡使光線折返,可減小測量誤差,簡化整機結構,便于攜帶及現場使用。
(3) 采用最小二乘評定法編制了直線度誤差評定軟件,功能齊全,運算速度快,易于掌握。
通過對電感傳感器測得的Ri 值進行數據處理,可用兩個不同截面四點定圓心的方法模擬計算實際缸孔和曲軸孔軸線相對于標準缸孔和曲軸孔軸線的偏差,并計算出缸孔軸線相對曲軸孔軸線的垂直度誤差和位置度誤差。垂直度誤差的計算公式為
位置度誤差的計算公式為
下一篇: PLC、DCS、FCS三大控
上一篇: HUMIREL濕度傳感器公

型號:ML200PS1PC
價格:面議
庫存:10
訂貨號:ML200PS1PC

型號:ABH200PSC1B
價格:面議
庫存:10
訂貨號:ABH200PSC1B

型號:GLGD12D
價格:面議
庫存:10
訂貨號:GLGD12D

型號:19C003PG1K
價格:¥8000
庫存:10
訂貨號:19C003PG1K

型號:13C0500PA1K
價格:¥5500
庫存:10
訂貨號:13C0500PA1K

型號:SPT4V5000PS5W10
價格:¥7500
庫存:10
訂貨號:SPT4V5000PS5W10


