發布日期:2022-08-21 點擊率:56
PID(比例—積分—微分)控制器,廣泛應用于傳感器和工業控制中。PID控制算法的一種傳統表示式為:

式中:t—時間;E—控制過程變量,E通常是跟蹤誤差,等于傳感器實際測量值減設置點值;P—比例增量;I—積分增量的反商;D—微分增量。
參量P、I和D是特定應用中控制器的可調設置。控制器用控制工作OUTPUT,定標之后并經調節控制器(例如開關)迫使控制過程接通和穩定在設置點(即E=0)。
方程(1)右邊第一項代表P模式或P操作,這是表示控制環路速度和穩定性的基本模式。有時單獨實現P模式。意想不到的P模式原來是誤差百分比,P模式可保證過程將穩定在設置點。事實上,實際的P模式控制器就穩定在不是設置點的地方(即E≠0)。下面簡化的P模式模型可以說明此疑題:

在這里我們假定傳感器的測量M正比于控制工作OUTPUT。假定定標因數C是1并達到OUTPUT=SET POINT,于是無限增益P包含在方程(2)中是與事實不符的。所以,P模式不可能完全消除誤差。
為了克服上面所討論的P模式局限性,所以,把方程(1)中第2項積分I模式引入計算中。此積分表示在規定時間標定內所有上述誤差,它等于稍微改變的設置點,所以,控制器完全可消除誤差。雖然I模式能平均噪聲,但往往會積聚慢變化的誤差。雖然現在的誤差為零,但控制器力圖修正過去的誤差,調整過程偏離設置點并導致控制不穩定。這種行為特別可能發生在慢速控制系統中,在這種情況下,必須組合P模式來獲得控制穩定性。
方程1中的第3項D模式用于加速控制運算以及防止過反應。D模式只在過程正在迅速變化時起作用。若有突然干擾使過程偏離設置點,則D模式在控制工作范圍內立即產生1個小的響應來快速降低過程誤差。另外,若逼近設置點的速率太快,則D模式將減速過程以避免控制過沖。數字上,D模式中的微分在控制工作中增加超前時間,有效地補償P和I模式中的延遲。然而,濫用D模式可能導致過程不穩定,這是因為快速瞬態信號噪聲可能在D模式中產生大的信號尖峰并導致控制過反應。這可能是快速系統中的一個問題。所以,D模式應限制只用于初始和前端誤差校正,然后轉交控制到P和I模式。
雖然流行的PID控制大多數與數字微處理器(mP)有關,但基本原理適用于傳感器。例如,借助于軟件或硬件(或兩者組合)的PID控制在前置μP信號條理中采用P模式。這通常涉及到用放大器和濾波器來提高μP的ADC端口中的SNR。I模式應用可簡單地解一組取樣的均方根、平均或標準偏差。D模式只不過求出經過時間的信號斜率。為了得到最佳性能,任何控制操作必須基于從所有3個模式得到盡可能多的信息。
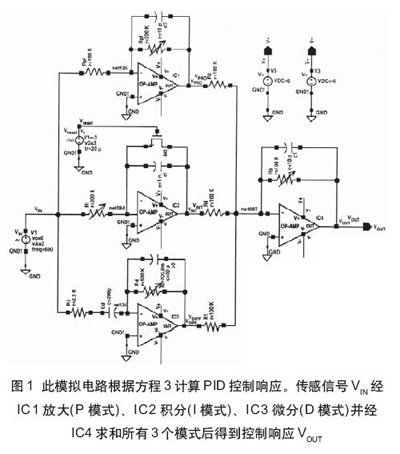
方程1不僅僅可以直接適用于大多數格式的軟件,而且也可以用模擬電路實現(見圖1)。用通用運放IC1、IC2、IC3和IC4分別做為調整放大器、積分器、微分器和求和放大器,這些都是典型的配置。傳感器檢測的過程變量是電壓V1N和電路控制響應電壓VOUT,它們的關系為:
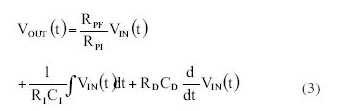
盡管PID控制技術有不少的格式,但把它的基本原理應用在傳感器電路中是相當實用和靈活的(見圖2)。來自傳感器電路中的過程變量是INPUT,此變量導致的控制如同Vout-D。IC6用做跨導放大器,與傳感器接口。IC5在IC6之后構成一個有源帶通濾波器。運放IC7、IC8和IC9構成緩沖器以避免負載效應。IC10是電壓比較器。IC11、IC12和IC13是常復位的D型觸發器。
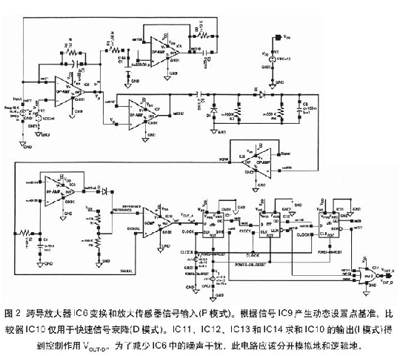
圖3示出此電路的SPICE仿真。首先,跨導放大器IC6必須是低噪聲并且有合適的AC響應,此響應由與IC5有關的電阻器和電容器調諧。在這種情況下,IC6選擇10KHz載波帶通和放大,抑制來自環境干擾的其他頻率和DC偏移。編碼過程變量為INPUT,做為載波調幅(AM)。放大(P模式)過程變量INPUT,經IC6變換到AM電壓信號VP,經C5/D1電平變換,然后由D0/C6峰值檢測得到SIGNAL。SIGNAL是AM信號INPUT的包絡。
IC10對SIGNAL和REFERENCE進行比較。注意由R5/C4濾波的SIGNAL本身產生REFERENCE。雖然,SIGNAL慢速變化,但電路保證REFERENCE=SIGNAL-0.7V(因為D2的原因),所以VOUT-A=HIGH時,IC10可以檢測信號。此特性為傳感器提供大信號動態范圍,這可抑制由于硬件老化或環境背景變化引起的任何慢速信號變化。只有在SIGNAL的衰降率大于時間常數R5×C4(D模式)或SIGNAL幅度小于噪聲電平(P模式)時,在VOUT-A=LOW情況下IC10將告知零。
IC11、IC12和IC13相繼取樣和鎖存比較器輸出。只有在所有三個觸發器鎖存在其Q0是HLGH時,電路控制作用VOUT-D在NOR門IC14處通過邏輯累加(CI模式)將變為HIGH。其他情況下,控制作用為零。
電壓分壓器R6/R7在零信號條件下提供必須的REFERENCF補償。注意在不同電路節點的R3、R4、R5和信號極性對每個應用要求可能是不同的。最后,電路的控制工作VOUT-D可用于帶ON/OFE型開關的閉環控制或繼電器失效一安全應用中的開環控制。
下一篇: PLC、DCS、FCS三大控
上一篇: 變速、無傳感器馬達控

型號:ML200PS1PC
價格:面議
庫存:10
訂貨號:ML200PS1PC

型號:ABH200PSC1B
價格:面議
庫存:10
訂貨號:ABH200PSC1B

型號:GLGD12D
價格:面議
庫存:10
訂貨號:GLGD12D

型號:19C003PG1K
價格:¥8000
庫存:10
訂貨號:19C003PG1K

型號:13C0500PA1K
價格:¥5500
庫存:10
訂貨號:13C0500PA1K

型號:SPT4V5000PS5W10
價格:¥7500
庫存:10
訂貨號:SPT4V5000PS5W10


