發布日期:2022-10-09 點擊率:43
在復雜環境中工作的機器人必須滿足這樣的先決條件:能夠利用傳感器對周圍環境進行識別,具有一定的“學習”和“自我調節”能力。在市場上,有著各種依靠圖像監控或力的檢測來控制機器人的傳感器,但是仍缺乏“滑移”傳感器,即能夠對機器人的手指與被握物體之間的相對運動進行在線檢測和補償的傳感器。
建議您采用的大多數解決方案都是基于切向力或者摩擦力檢測為基礎的。即利用接觸傳感器對接觸時的切向力大小進行檢測或者利用摩擦振動加速傳感器對相對位移間接進行檢測和估計。而迄今為止常見的傳感器還無法對相對滑移速度進行直接的檢測。較高的研發費用是一直沒有成功實現相對滑移直接檢測技術工業化應用的主要原因。
與現在建議使用的方案不同,在IITB霍倫霍夫研究所中研發成功的光學傳感器能夠直接對相對滑移進行檢測。結合接觸力檢測傳感器可以滿足要求極高的智能化機器人方案。在這個方案中,能夠經濟合理的使用光學傳感器,由于其結構緊湊可以很好的集成在機械和機床設備中。
這種方案的應用領域非常廣泛,但是目前主要集中在下列兩個領域中:
(1)依靠力量進行可靠夾持和操縱的易碎工件;
(2)無定位或者可移動工件的表面擦洗和磨削。
工作原理
光電滑移傳感器的工作原理類似光電鼠標。與機器人手指接觸的物體表面被發光二極管或激光二極管發出的光線照射著,由被照射物體表面反射回來的光線經透鏡折射后進入傳感器芯片中的微型攝像機中(圖1)。攝取的圖像作為灰度等級圖片進入傳感器芯片中的DSP數字信號處理器,并在這個微處理器中首次被轉換成速度信號。最后,再根據這些速度信號計算出滑移數據(△x和△y值)。

速度計算過程中使用的計算語言是光流語言,計算量較小。作為光流(Optical Flow)實際上是一個矢量場,它能夠表示每一個圖片、像素,圖像順2D運動方向和速度的矢量場。
光電傳感器的檢測功能是以圖像處理為基礎。傳感器必須能夠接收10000幀/s,最大空間清晰度為3200采樣精度(fps)的圖片。不僅是拍攝速度,其清晰度也遠遠高于大多數接觸力式傳感器。
這種高清晰度滑移傳感器可檢測:
(1)物體的材料和表面結構;
(2)至被測物體表面的間距;
(3)傳感器與被測物體之間的非線性相對速度(圖2)。
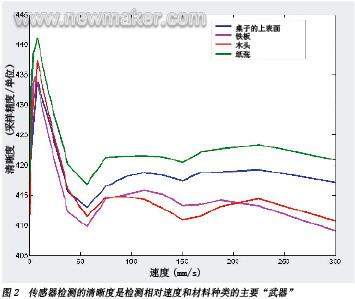
這種非線性關系的確定是依靠引入的逆元模塊來實現的。模塊的參數是按照被測物體精確予以設置的,在檢測未知物體表面時,也可通過模塊自動計量校定功能完成非線性關系的檢測。
由于它具有在機器人與被測物體之間檢測相對滑移速度的功能,因此這種滑移傳感器主要用于自動化清洗和磨削生產。通過檢測到的材料的非線性特性曲線,可以自動識別不同的表面結構,最終評定材料的種類。通過自動的計量校定方法,利用檢測到的非線性特性曲線,還可以對未知物體的材料做出判別。在結合使用力—扭矩傳感器之后,還可以對動態的力—滑移情況進行檢測、調節和控制,最終得到所希望的恒定握持接觸力和清洗速度,保證能夠在弧形的物體表面進行清洗。從而省略了復雜的工件定位操作,使得需要清洗或磨削的工件由人來握持,甚至工人還可以在清洗、磨削過程中移動。
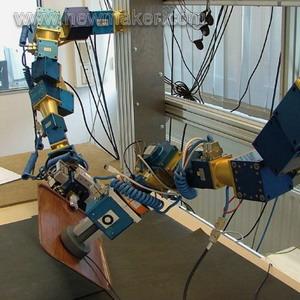
圖3 沒有定位固定甚至移動物體的清洗或者磨削
快速、簡便的完成空間固定坐標系中工件不運動時的局部軌跡編程是現代機器人編程技術中的難點,通常在機器人的軌跡編程中要付出很大的努力。而采用這種技術后能夠自動識別工件的輪廓,從而實現工件表面的自動化加工。
在IITB霍倫霍夫研究所中,專門進行了一次實際應用的試驗,實現了機器人在磨削時的工件表面壓緊力保持恒定的局部軌跡編程。在進行該工件的表面磨削時,工件沒有采取任何方式的裝夾固定,是由一個操作人員或一個機器人“拿”在手中。所使用的滑移傳感器的圖像攝像速率達到2300fps,采樣精度達400幀/s,傳感器的外廓尺寸為35mm×75mm×6mm,外殼直徑100mm。
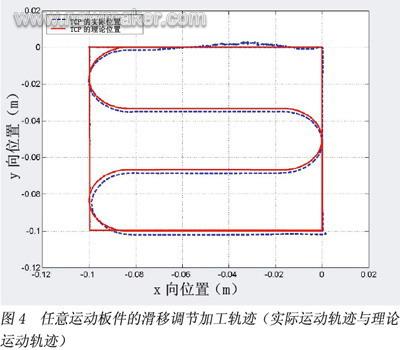
在依靠壓緊力和滑移調節的傳感器控制效果試驗中,對沒有裝夾固定的工件在不同加工速度和運動速度的情況下,對表面加工精度進行了詳細的研究。在圖4所示的檢測曲線中,板件為蛇行運動,軌跡速度為300mm/s。在磨削加工過程中,工件的運動速度為37.5mm/s,加速度為30mm/s2。盡管工件的運動為一種干擾性很強的蛇行運動,但是它所引起的工件加工誤差相當小。試驗結果表明軌跡誤差相當于實際運動的1%左右。
可靠抓取平滑表面
在工業生產和家用電氣領域中,機器人和機械手在抓取有著光滑表面的易碎物品時往往會遇到很多的難題。一方面,要求機器人的手指有足夠的抓取力,保證被抓取的物品不會脫落;另一方面,又要求抓取力不能太大,不至于把被抓取的物品擠碎。對于易碎物品(例如玻璃管、試驗玻璃杯等),當抓取時用力太大會被夾碎。既要防滑使物體不會自行脫落,又要可靠的抓住摩擦系數未知的物品,這只有在機器人能夠智能化的控制滑移和調節加緊力時才能實現。
IITB霍倫霍夫研究所利用他們的光電傳感器和Schunk公司生產的PG070標準機械手(圖5)首次成功的完成了滿足上述要求的試驗。機械手的手指中安裝了Weiss Roborics公司研發生產的Array DAS 9205接觸式傳感器,在其另一個手指中安裝的是檢測滑移的光電傳感器。該光電傳感器的拍攝速度為1500fps,清晰度為每英寸300采樣單位,外形尺寸為23mm×60mm×6mm。滑移光電傳感器的第一次實際試驗獲得了理想的結果,保證其能可靠、無損傷的“拿”住塑性和陶瓷物體。即使是在負載和摩擦系數變動時也可以可靠的完成任務。
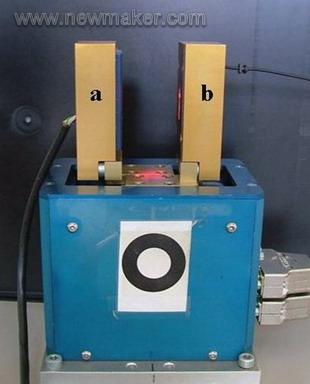
圖5 集成有滑移傳感器的雙指機械手,a手指中安裝的是滑移傳感器,
b手指中安裝的是接觸式Array傳感器
總結IITB霍倫霍夫研究所的發明成果可以確定,他們研發成功的滑移傳感器開啟了智能化機器人研發生產的大門,解決了迄今為止工業化生產和裝配過程中,實驗室自動化和伺服機器人中長期以來一直沒有解決的難題。尤其是在物品清洗和工件表面加工以及可靠抓取易碎物品方面,應用前景十分廣闊。這種滑移傳感器可以經濟的大批量生產,其結構緊湊的外形可以使它方便的集成在復雜的機械機構中。(end)
下一篇: PLC、DCS、FCS三大控
上一篇: MEMS加速計高壓滅菌器

型號:E3FARP21
價格:面議
庫存:10
訂貨號:E3FARP21
型號:E3Z-LS61 2M BY OMS
價格:面議
庫存:10
訂貨號:E3Z-LS61 2M BY OMS
型號:BOS R020K-PS-RX11-00,2-S49
價格:面議
庫存:10
訂貨號:BOS R020K-PS-RX11-00,2-S49
型號:HG-C1400
價格:面議
庫存:10
訂貨號:HG-C1400
型號:EE-SX672P
價格:面議
庫存:10
訂貨號:EE-SX672P
型號:E3Z-T61-D 2M
價格:面議
庫存:10
訂貨號:E3Z-T61-D 2M


